成像清晰度是鏡頭優劣的重要指標之一,在鏡頭制造業筆者見過簡易的逆投影以及更精準的鏡頭MTF測試,本文要講述的是后者設備測試原理及如何通過測試數據判斷鏡頭的品質。
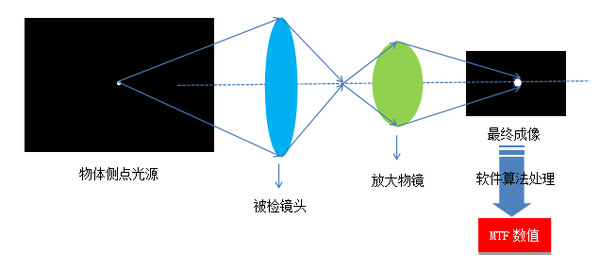
測量MTF的設備,首先需要一個極微小發光體,通過被檢測鏡頭成像,然后選擇合適的高倍物鏡放大并成像到設備CCD上,將圖像傳輸到電腦用專用軟件分析光強度分布,最終通過傅里葉變換計算得出MTF。
MTF 測試中常用三種發光體:點,狹縫,刃邊。以下將逐一介紹如何用這三種光源。
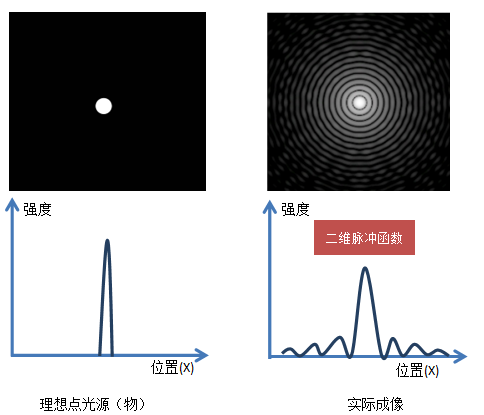
一個理想的點光源可以看成是XY方向上無限小的物體,其能量分布用二維脈沖函數δ(x, y)來表示。理想的點光源經過由像差的光學系統后,所成的像會形成一個彌散斑,其光強分布即光學系統的脈沖響應,也被稱作點擴散函數PSF(x, y)。如下圖所示。
我們用一個與位置有關的函數h(x, y)來表示脈沖響應的光強分布,用“*”表示成像過程的卷積操作,則一個理想輸入f(x, y)經過光學系統成像后再像面的強度分布g(x, y)可以表示成:
g(x, y) = f(x, y)*h(x, y)
對上式兩端分別進行二維傅里葉變換,有
G(fx, fy) = F(fx, fy)H(fx, fy)
式中,G(fx, fy),F(fx, fy)和H(fx, fy)分別是g(x, y),f(x, y)和h(x, y)的傅里葉變換,fx和fy是頻域中沿兩個坐標方向的空間頻率。函數H(fx, fy)就是我們要求得到的光學傳遞函數(OTF)。OTF是一個包括實數和虛數兩部分的復變函數,可以寫成下述公式:
OTF(fx, fy) = |H(fx, fy)|expφ(fx, fy)
其中,實數部分|H(fx, fy)|就是我們要得到的MTF。
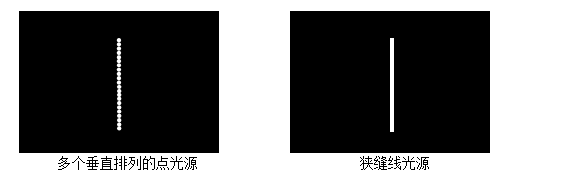
因為點光源提供的能量較弱,而且得到理想的點光源也比較困難,所以常用的方法是用狹縫來產生線光源。如下圖,多個點光源(間隔無限小)假設沿y方向排列形成一維光源,各發光點不相干,則等效狹縫可以看成y方向為常量,以x為變量的delta函數。可以用下式表示:
f(x,y) = δ(x)l(y)
狹縫的沿X方向的光強度分布就是線擴散函數LSF,所以狹縫成像的光強度分布g(x, y)可以表示成:
g(x, y) = LSF(x) = f(x, y)*h(x, y) = [δ(x)l(y)]*PSF(x, y)
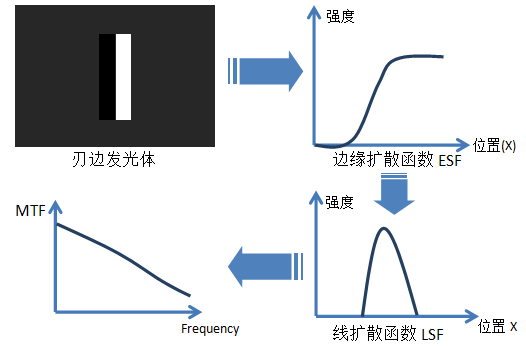
如果在某些條件下狹縫提供的能量還是不夠,那么就需要用到刃邊作為光源體,通過邊緣擴散函數ESF求導得到LSF,間接計算出MTF。
點光源、狹縫、刃邊的測試方法除了提供能量不同之外,差異還包括點光源可以同時計算任意角度的多個方向的MTF,狹縫和刃邊一次只能計算一個方向的MTF。由于CCD采集信號噪聲的影響,狹縫相比點光源有更高的測量精度,刃邊比狹縫多了一次求導,會使得噪聲增加。所以三者相比之下,狹縫LSF是比較穩定的測量MTF方法,德國trioptics公司使用的就是狹縫LSF測量法。
因為暫時沒有模擬LSF圖像的方法,下面筆者以點光源模擬成像和模擬計算MTF的數據來說明如何分析MTF。
選用鏡頭規格 1/2.6” I.H=3.432mm, F2.2, FL=4.42mm。
鏡頭放置在測量設備上(假設點光源在物體側),設備機構如果事先有校正,測試開始后,應該很容易找到中心視場成像如下,隨后設備會測量中心點像的離焦MTF,過程模擬如下:
a) 搜索到中心視場的點像,記錄下此時defocus位置P0

b) 從P0 - 0.03位置開始攝取點像并計算MTF,假定step為0.01,測到P0 + 0.03。 (如果焦深很大,則P0兩側的defocus測定范圍也要相應的擴大)
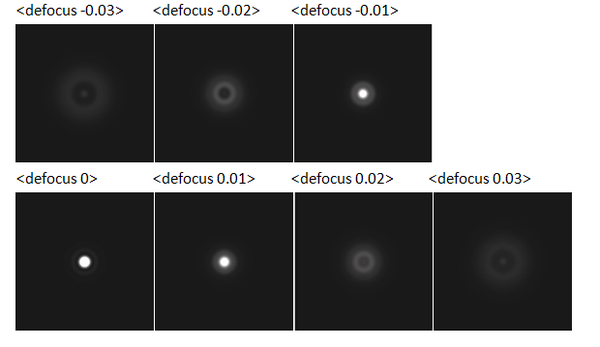
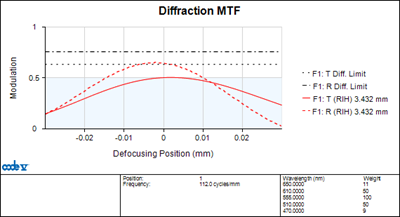
7個defocus位置的MTF近似繪制MTF through focus曲線,設備軟件計算出peak位置,并移動物鏡對焦在peak位置上

如果測量的是mtf vs field(0~1.0field,step 0.1field),那么接下來測量過程如下:
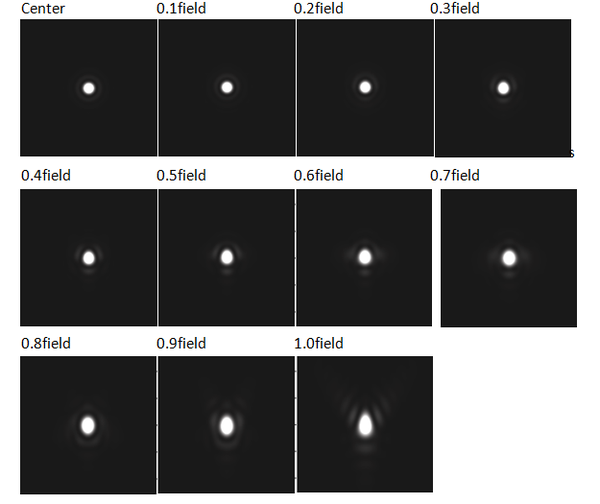
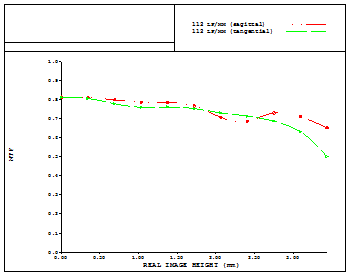
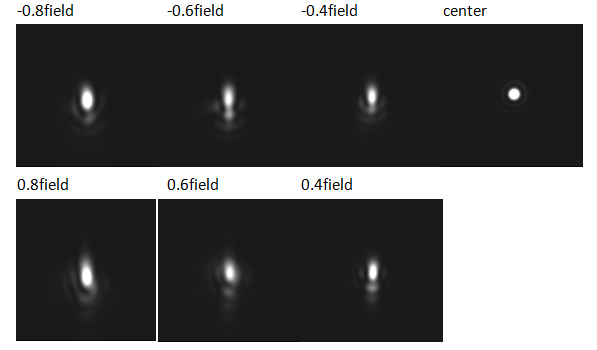
因為是點光源,所以T.S兩個方向一次全部計算出來了,各視場MTF連起來曲線如下:
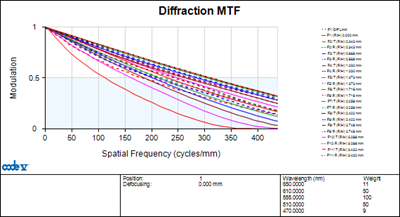
這個過程同樣可以輸出mtf vs frequency如下:
如果要測量周邊視場的mtf through focus曲線,則每個視場都要重復步驟b。
1.0field T.S example
各defocus的MTF連起來即為下圖。
以上即為MTF實際測量的過程,原理很簡單。鑒于以上MTF及點像是鏡頭設計值輸出,下面輸出一組包含tolerance的數據。為簡化輸出,field設定+/- 0.8, +/-0.6, +/-0.4, center。
其MTF vs field數據如下,是顆很差的鏡頭,尤其是T方向差。
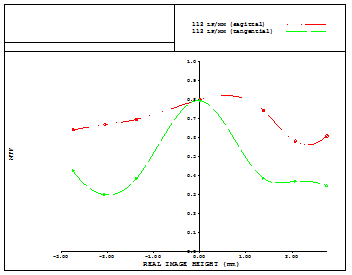
各視場MTF through focus數據如下:
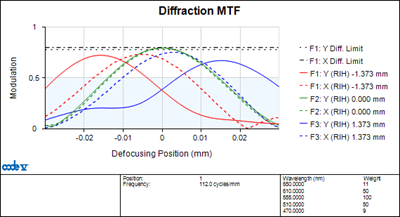
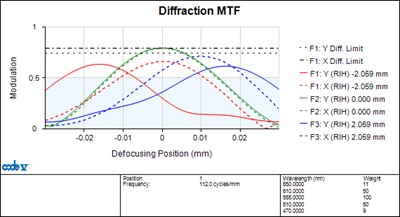
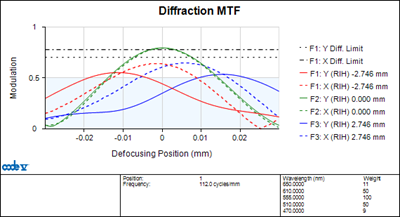
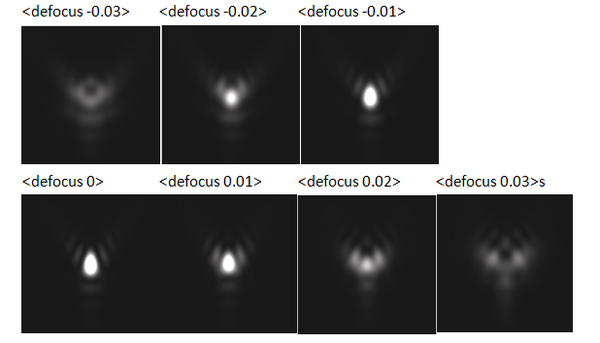
從mtf through focus曲線看出,像面tilt是MTF NG的主要原因。以+/- 0.8F為例,我們看看through focus的點像如何。
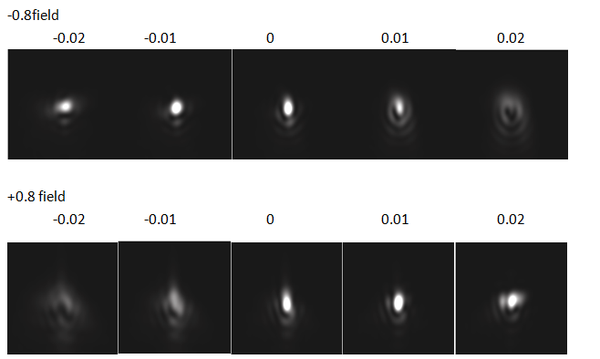
從上圖很容易看出,Y軸方向代表T,-0.8field在defocus-0.01是Y方向光線匯聚最佳的,而+0.8field在defocus 0.02的時候Y方向最匯聚,但是X方向卻發散,意味著S方向在defocus +0.01匯聚最佳。要矯正+/- 0.8field,可以選擇傾斜sensor,使sensor image plane 正方向落在defocus 0.01mm位置,而負方向落在-0.01mm,此時系統擁有最佳的組合解析力。因此鏡頭的測試不僅可以鑒別鏡頭的質量也可以為成像系統的設計增加更多依據。
深圳市賽麥吉圖像技術有限公司致力于以先進的技術為用戶提供優質的產品和服務。您可以通過電話聯系我們:400-666-2522 或訪問我們的官網:www.bd1dlr9.cn